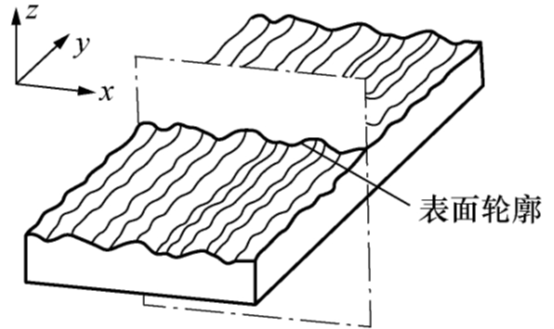
表面粗糙度是描述表面微观轮廓的基本参数,对于评价产品性能至关重要。在机械加工、薄膜制备、微纳机电系统以及光学精密加工等领域,表面粗糙度是评价产品性能的重要指标之一。为了提高加工检测效率,实现尺寸形位公差与微观轮廓的同平台测量,本文提出一种基于光谱共焦位移传感器的在线集成表面粗糙度测量方法。
一、测量系统及原理
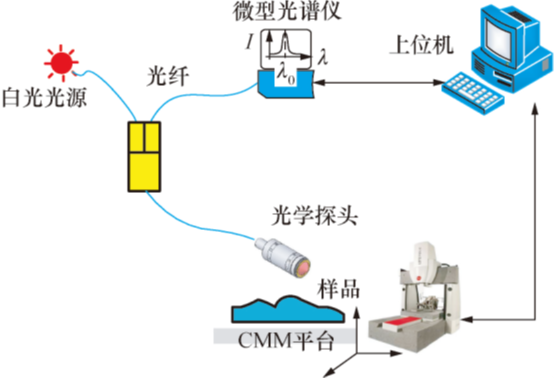
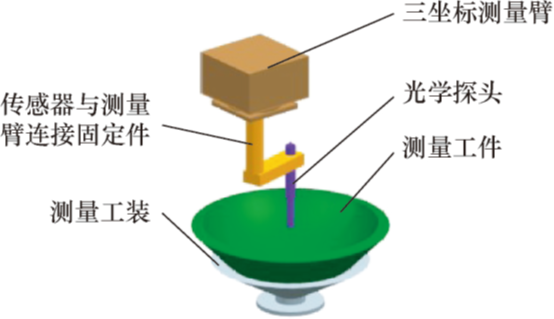
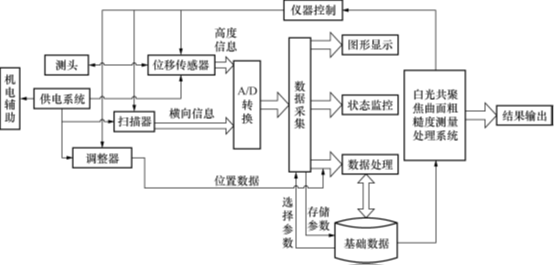
该在线集成表面粗糙度测量系统以一台三坐标测量机(CMM)为平台,构建了测量系统。系统结构主要由光学探头、白光光源、微型光谱仪、光纤等组成光谱共焦位移传感系统,并利用工业现场常用的三坐标测量机平台执行轮廓扫描。
其中,光学探头、白光光源、微型光谱仪、光纤等元件组成了光谱共焦位移传感系统,测量量程为300μm,横向分辨率为4.5μm,纵向位移测量精度达到纳米级别,较好地满足了表面粗糙度测量对光探针尺寸和精度的要求。
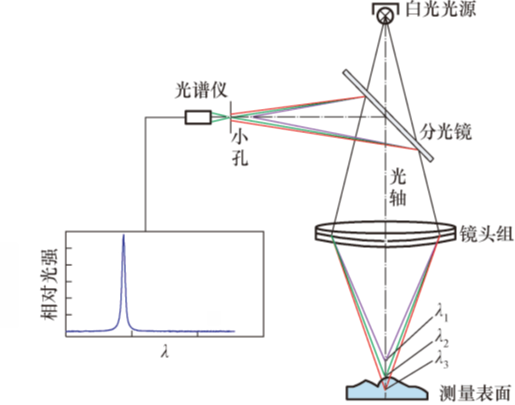
坐标测量平台利用其高精度和稳定的三维空间运动定位能力以及方便在线部署的特点,作为表面粗糙度测量的扫描运动执行器。通过特殊光学设计形成的透镜组将白光光源发出的多色平行光进行光谱分光,形成一系列波长不同的单色光,同时再将其同轴聚焦,由此在有效量程范围内形成了一个焦点组。每一个焦点的单色光波长都对应着一个轴向位置。测量时通过光谱仪分析光谱峰值结合峰值提取算法从而确定被测点的高度位置信息。
二、测量流程
表面粗糙度测量方法的具体流程如下:
待测工件定位:将待测工件平稳置于坐标测量机测量平台上,调用标准红宝石测针测量其空间位置和姿态,为按测量工艺要求确定测量位置提供数据。
轮廓扫描:测量机测量臂更换挂载光谱共焦传感器的光学探头,驱动探头运动至工件测量位置,调整光源光强、光谱仪曝光时间和采集频率等参数以保证传感器处于较好的工作状态。编辑扫描步距、速度等运动参数后启动轮廓扫描测量,并在上位机上同步记录扫描过程中的横向坐标和传感器高度信息,映射成为测量区域的二维微观轮廓。
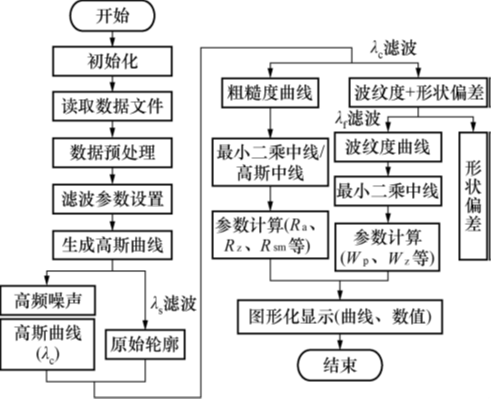
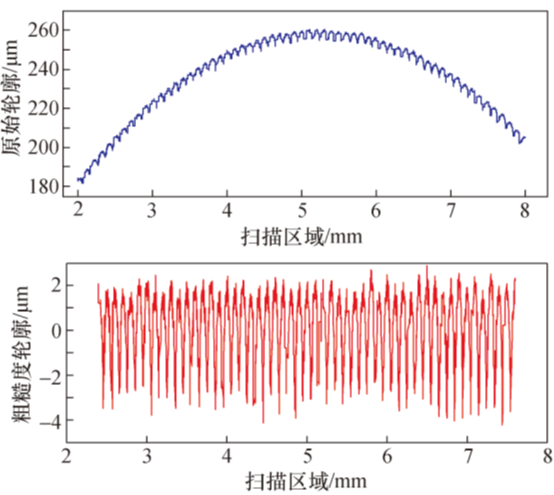
表面粗糙度计算与评价:将扫描获取的二维微观轮廓数据输入到轮廓处理算法内进行计算。按照有关国际标准选择合适的截止波长,按高斯轮廓滤波方法对原始轮廓进行滤波处理,得到其表面粗糙度轮廓,并计算出粗糙度轮廓的评价中线。再按照表面粗糙度的相关评价指标的计算方法得出测量结果,最后得到被测工件的表面粗糙度信息。
三、硬件控制与轮廓处理环境的建立
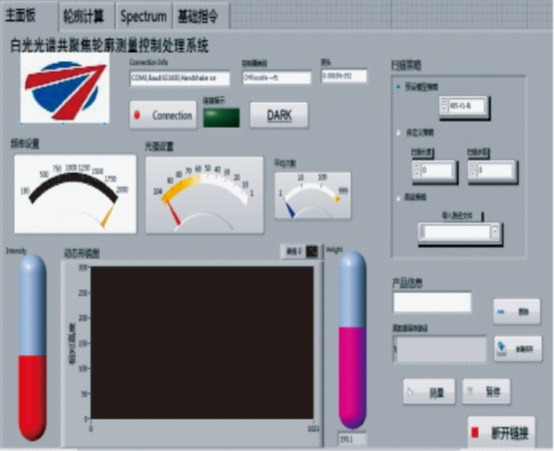
为了实现工件微观轮廓的扫描和表面粗糙度测量的协调控制,基于USB和Ethernet通讯接口和协议,在上位机LabVIEW平台上开发了系统的硬件通讯控制模块。同时配套了高斯轮廓滤波处理及表面粗糙度的评价环境,建立了非接触的表面粗糙度测量能力。
四、实验结果与讨论
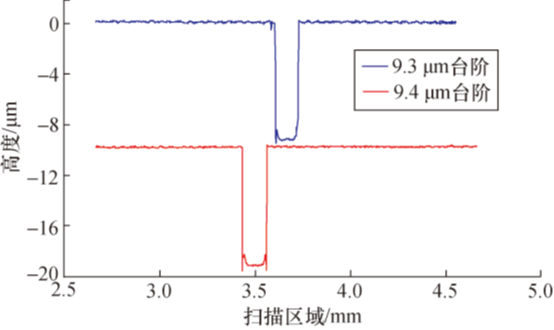
为了验证该方法的可行性和有效性,对标准台阶、表面粗糙度标准样块和曲面轮廓样品进行了测量。实验结果表明:该测量系统具有较高的测量精度和重复性,粗糙度参数Ra的测量重复性为0.0026μm。与传统的接触式轮廓仪和扫描白光干涉轮廓仪相比,基于光谱共焦的在线集成表面粗糙度测量方法具有更高的检测效率和更好的适应性。优化零件检测流程和提高整体检测效率等方面具有一定的应用前景。
总之,基于光谱共焦的在线集成表面粗糙度测量方法具有非接触、高精度、高效率等优点,可广泛应用于机械加工、薄膜制备、微纳机电系统、光学精密加工等领域。